
Istnieje kilka metod, za pomocą których możemy wyznaczać pozycję. Różnice pomiędzy nimi sprowadzają się do uzyskiwanych dokładności, szybkości przeprowadzania pomiarów oraz kosztów urządzeń.
Pozycjonowanie punktowe
Pomiar przy pomocy tej metody wymaga tylko jednego odbiornika GPS. Do wyznaczenia pozycji niezbędna jest wiedza o współrzędnych oraz odległościach (pseudoodległości) do minimum czterech satelitów. Urządzenie pozycjonujące otrzymuje współrzędne z depeszy nawigacyjnej, a odległości pozyskiwane są z kodów C/A lub P(Y).

Pozycjonowanie punktowe
Pomiary pseudoodległości zniekształcone są przez błąd synchronizacji, błąd zegara atomowego (satelita) oraz błąd zegara kwarcowego (urządzenie pozycjonujące). Czas zegara atomowego korygowany jest dzięki depeszy nawigacyjnej, natomiast błąd zegara kwarcowego traktowany jest jako czwarty nieznany parametr. To powoduje, że ilość nieznanych parametrów wynosi 4: trzy to współrzędne urządzenia pozycjonującego, czwarty to błąd zegara odbiornika.
Dzięki pozycjonowaniu punktowemu możemy osiągnąć dokładność od kilku do kilkunastu metrów.
Pozycjonowanie względne (relatywne, różnicowe)
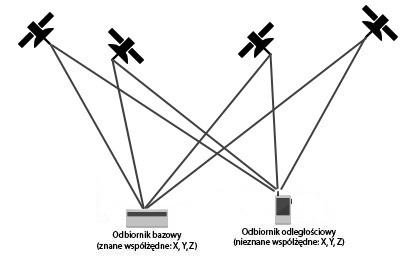
Do wyznaczania pozycji wykorzystuje się tutaj dwa urządzenie jednocześnie. Jedno z nich zwane stacją bazową (referencyjną), pozostawione jest na stałe w miejscu z dokładnie znanymi współrzędnymi (np. pozycja określona na podstawie pomiarów geodezyjnych). Drugie zwane odbiornikiem odległościowym może, ale nie musi, być pozostawione nieruchomo - zależy to od rodzaju pomiaru.
Pozycjonowanie względne zapewnia centymetrową, a w niektórych przypadkach nawet milimetrową dokładność. 
Ogólny schemat pozycjonowania relatywnego
Możemy wyróżnić następujące typy pomiarów względnych:
- Pomiar statyczny (Static)
- Pomiar szybki statyczny (Fast / Rapid Static)
- Metoda "Stop-and-go"
- Pomiary kinematyczne GPS (Real Time Kinematic)
- Różnicowy pomiar GPS (DGPS)
Pomiar statyczny
Zarówno lokalizacja bazy (znane współrzędne), jak i lokalizacja odbiornika odległościowego (nieznane położenie), nie zmieniają się podczas pomiarów. Zbieranie danych może trwać od kilku godzin do kilku dni. Im większą dokładność chcemy uzyskać, a także im dalej znajduje się stacja bazowa, tym pomiar powinien trwać dłużej.
Metoda statyczna pozwala uzyskać bardzo dużą dokładność pomiarów.
Pomiar statyczny
- Charakterystyczne cechy:
- Czas pomiaru dla jednej lokalizacji: od kilka godzin do kilku dni,
- Odległości: od 10 km,
- Dokładność horyzontalna: do 5 mm + 0.5 ppm (rms)
- Dokładność pionowa 5 mm + 1 ppm (rms)
- Sposób opracowania danych: Post-processing.
- Metoda pomiaru: fazowa
Pomiar statyczny przy użyciu metody fazowej jest najbardziej dokładną techniką pozycjonowania.
Pomiar szybki statyczny
Odbiornik odległościowy pozostaje w nieznanej lokalizacji tylko przez krótki czasu. Po dokonaniu pomiaru, następuje jego przemieszczenie w inne miejsce z nieznanymi współrzędnymi. Podczas transportu nie ma konieczności ciągłego kontaktu z satelitami.
Do pomiarów należy wykorzystać odbiornik działających na dwóch częstotliwościach (L1 oraz L2), gdyż do wyznaczania pozycji używana jest tutaj metoda fazowa pomiaru pozycji.

Pomiar szybki statyczny
- Charakterystyczne cechy:
- Czas pomiaru dla jednej lokalizacji: 2 – 10 minut
- Odległości: do 20 km
- Dokładność horyzontalna: do 5 mm + 1 ppm.
- Dokładność pionowa do 10 mm + 1 ppm.
- Sposób opracowania danych: Post-processing
- Metoda pomiaru: fazowa
Metoda ta stosowana jest, gdy chcemy dokonać kilku pomiarów pozycji na pewnym niedużym obszarze.
Metoda "Stop-and-go"
Jak i w pozostałych metodach relatywnych, tak i tutaj używamy co najmniej dwóch urządzeń pozycjonujących, które śledzą w tym samym czasie te same satelity. Odbiornik bazowy ustawiony jest w miejscu z precyzyjnie znaną lokalizacją. Natomiast odbiornik odległościowy przemieszczany jest między punktami z nieznanymi lokalizacjami. W każdym taki punkcie odbiornik zatrzymuje się na krótką chwilę, aby zebrać potrzebne dane, które później zostaną wykorzystane do ustalenia pozycji (po zakończeniu wszystkich pomiarów). 
Metoda "Stop-and-go"
- Charakterystyczne cechy:
- Czas pomiaru dla jednej lokalizacji: 1 – 2 minuty
- Odległość od stacji bazowej: do 10 - 15 km
- Sposób opracowania danych: post-processing.
- Metoda pomiaru: fazowa
Metoda ta stosowana jest, gdy dokonujemy wielu pomiarów pozycji znajdujących się w niewielkim sąsiedztwie odbiornika bazowego.
Real Time Kinematic (RTK)
Umożliwia uzyskanie bardzo dokładnych pomiarów (1 – 3 cm) w czasie rzeczywistym. Do pomiaru wykorzystywana jest metoda fazowa, dlatego konieczna jest inicjalizacja pomiaru (pomiar statyczny). Istnieje również metoda szybkiej inicjalizacji, tzw. On-The-Fly, która umożliwia praktycznie natychmiastową inicjalizację. Wykorzystuje ona kombinację pomiaru fazowego oraz kodowego.
Jak w każdej metodzie relatywnej, tak i tutaj, mam dwa odbiorniki – bazę ze znaną pozycją oraz odbiornik, którego pozycja jest nie znana. Charakterystyczną rzeczą dla RTK jest to, że odbiornik w na bieżąco komunikuje się z bazą (VHF, GPRS) i pozycja wyznaczana jest w czasie rzeczywistym.
RTK wykorzystywany jest przede wszystkim w geodezji.

Pomiar w czasie rzeczywistym
- Charakterystyczne cechy:
- Odległość od stacji bazowej: 10 - 15 km
- Dokładność horyzontalna: do 10 mm + 1 ppm
- Dokładność pionowa do 20 mm + 1 ppm
- Czas pomiaru dla jednej lokalizacji: 1 – 5 sekund
- Sposób opracowania danych: real time positioning
- Metoda pomiaru: fazowa
Różnicowy pomiar GPS (DGPS)
Technika bardzo podobna do RTK, jednak tutaj wykorzystujemy metodę kodową do pomiaru odległości (pseudoodległości) od satelitów. Ma to niebagatelne znaczenie, ponieważ wtedy nie jest konieczny proces inicjalizacji jak w RTK, a i same późniejsze pomiary są bardzo szybkie. Skutkuje to tym, że DGPS może być wykorzystywany np. na lotniskach (zasięg stacji bazowej to zwykle około 20 km).
Dokładność DGPS jest jednak mniejsza niż w RTK, jednak nadal zadowalająco dobra – około 0,2 – 2 m.
- Charakterystyczne cechy:
- Odległość od stacji bazowej: zwykle około 20 km
- Dokładność: 0,2 – 2 metry
- Czas pomiaru dla jednej lokalizacji: w czasie rzeczywistym
- Sposób opracowania danych: real time positioning
- Metoda pomiaru: kodowa

Komentarze